
In 2015 I started working with Brian Yang on our first exploration into potential uses for the core mechanism found in pop-up books. Our first step was to build a deep understanding of the geometry and physics that allow pop-ups to operate. After folding hundreds of pieces of paper I decided it was time to create a computer simulation. Using Rhino and Grasshopper I created a geometrically driven simulator that visualized a pop-up based on angles of cuts and folds.
Although this simulation allowed for a much richer understanding of the complex relationships between geometry and motion, it was slow to operate. To make our simulator more elegant and useful we developed a design system that tracked a marker on a physical workbench and input data into the simulation as the user cut and folded. This system speeds up the pop-up creation work flow by increasing the number of iterations possible.
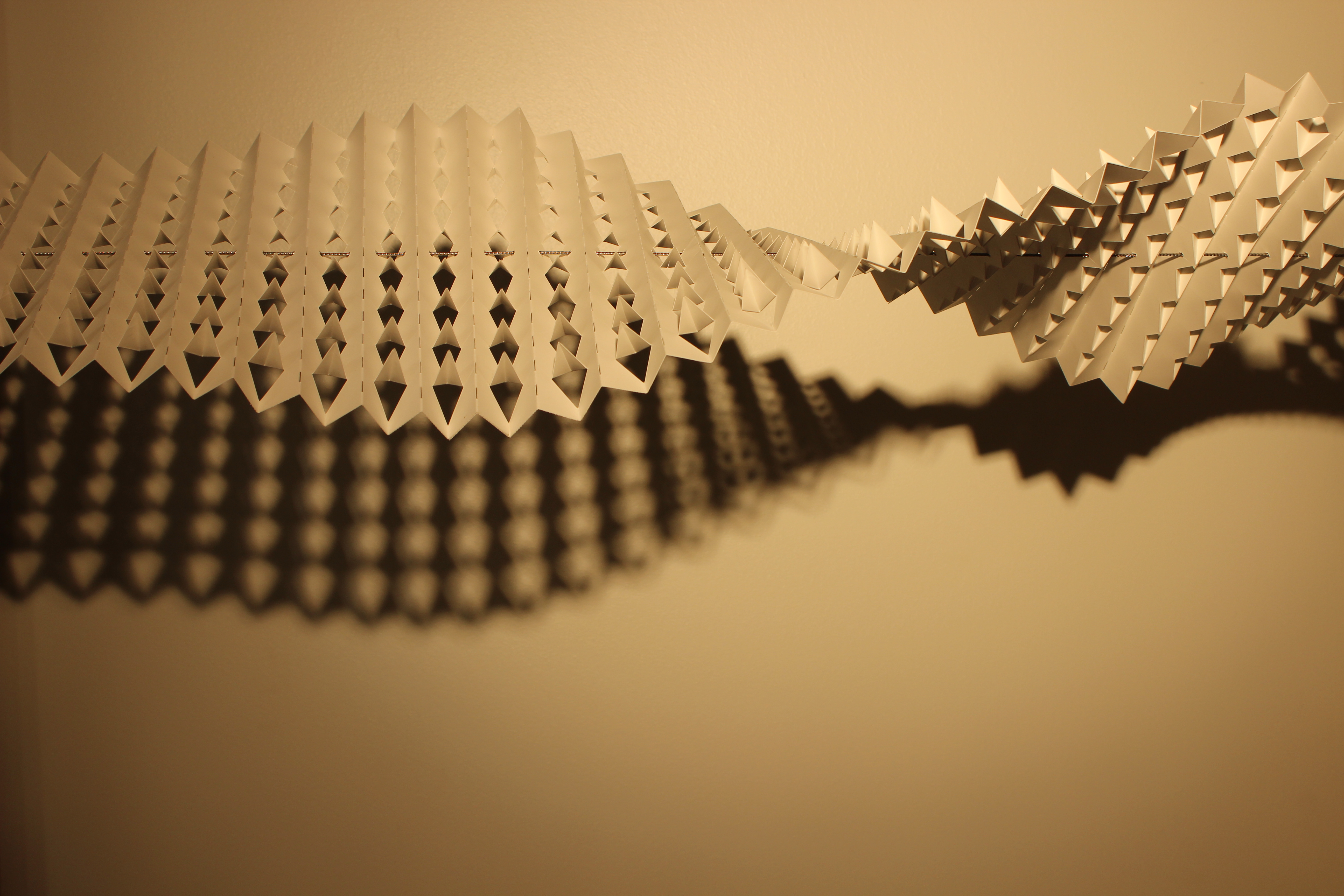
As this phase of the project came to a close we used our system to output laser cutter ready files. When folded we were left with a four foot tall artifact that folds and bends in complex ways determined by the core geometry of the pop-ups. Brian and I have continued our exploration of pop-ups with our RCP project when we designed and built a set of low cost cardboard robots that work on the same pop-up mechanism. You can learn more about the RCP here.