EVOLUTION OF THE ROBOTS
The second phase of my collaboration with Brian Yang exploring the pop-up mechanism focused on creating low cost racing robots. Click here to learn about the first phase.
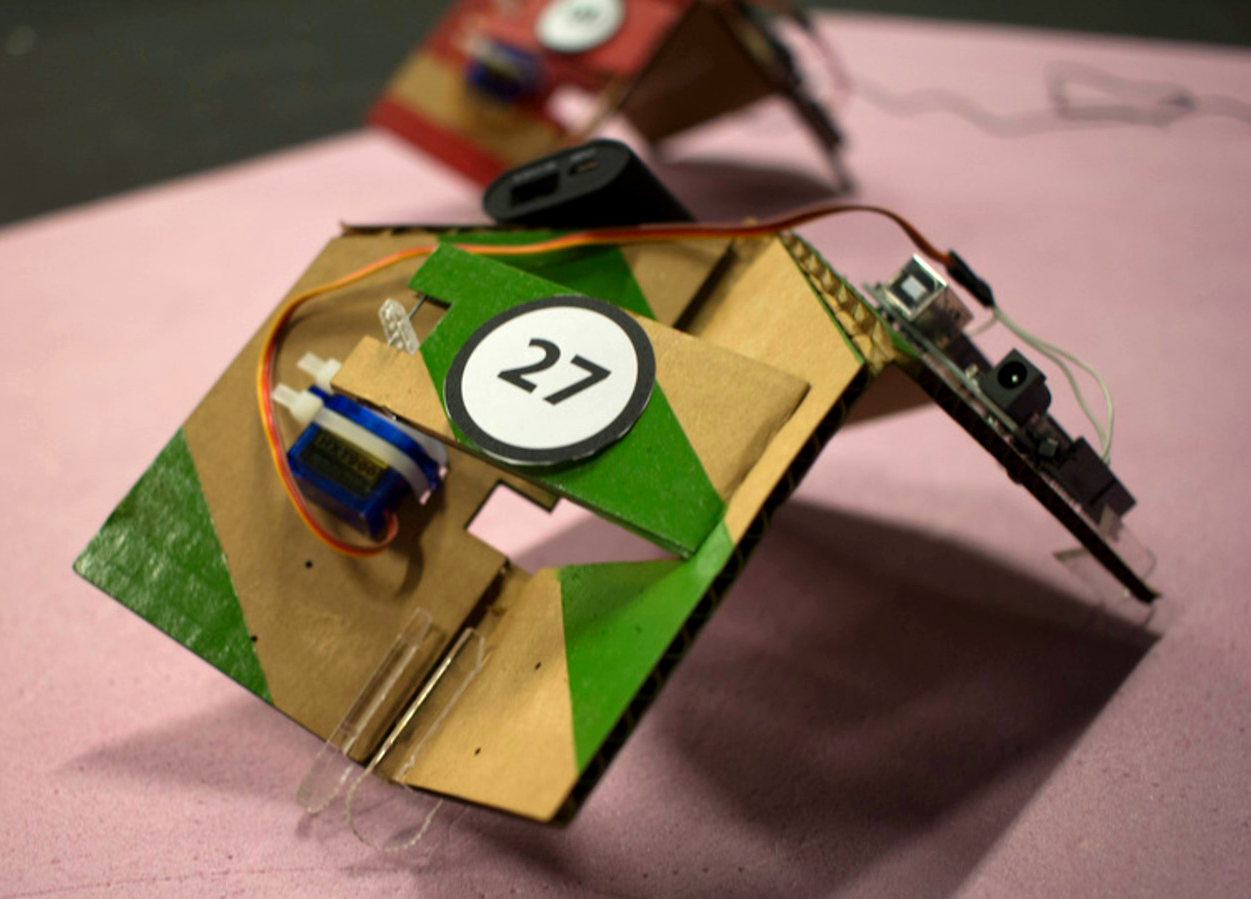
My first step in this project was to attach motors to a wide variety of geometric folds or pop-ups. Through these experiments I was able to figure out the best systems of driving different kinds of motion. I applied this knowledge to designing a system whereby the feet of the robot could slide along the ground or pull the robot forward depending on phase of the step. The result of several iterations of experimentation was a quick-to-produce and easy-to-customize robot that could walk in a way that evokes a living creature.
Each robot has its own unique personality based on the program in the on-board Arduino. Due to the inexpensive materials each robot is less than $10 to produce and because the body is made from laser cut cardboard it's easy to make many iterations moving the electronics from one body to the next.